 平台热线
平台热线





注:本文章文字、图片部分来自网络
版权归原作者,侵删。
您是否对将工业自动化集成到您的设施中感兴趣?如果是这样,那么您应该致电工业自动化和集成领域的领导者工博士。工博士是包括FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的员工致力于帮助您为您的行业和预算构建和定制完美的自动化系统。
硬件准备 / Hardware
KUKA机器人 KR C4 控制器
BECKHOFF 耦合模块 EK1100( EtherCAT )
BECKHOFF 输入模块 EL1809(16 个点数字量 )
BECKHOFF 输出模块 EL2809(16 个点数字量 )
注:全文提到的 BECKHOFF 是 “倍福” 品牌。
2
软件准备 / Software
与控制器相对应的 WorkVisual 软件 (随机光盘)
3
硬件连接 / Connection
在软件模块配置之前,下面我们首先为大家介绍一下如何安装接线:

将 CCU 上的 X44 接入 EK1100 的 EtherCAT IN 口。
EK1100 的四个指示灯(图上绿色区域),上面的两个常亮,下面的 link 灯高频闪烁,RUN 灯常亮。
电源端的接线用小螺丝刀(一字或十字)插入方孔中,斜向下拨压,将导线插入圆孔中,再将小螺丝刀释放取出,导线被压牢。
注意:EK1100 上方的 24V / 0V 是给 EK1100 自身供电的,而下方的 + / - 是给后续模块的输入/输出端子供电的,都需要接线。

输入回路需要与电源正极连接,故传感器或开关的一端接 EL1809 上的 16 个端子任意一个,另一端接EK1100 上的 + 。

输出回路需要与电源负极连接,故负载的一端接 EL2809 上的 16 个端子任意一个,另一端接EK1100 上的 - 。
4
软件配置 / Configuration
1. 导入模块设备说明文件(简称 ESI )文件
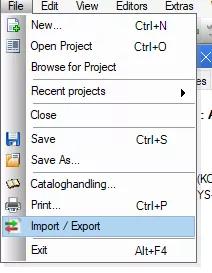
从 BECKHOFF 官网下载相关模块设备说明文件( ESI )。打开 WorkVisual 软件,菜单 File / import / Export / import device deion file。
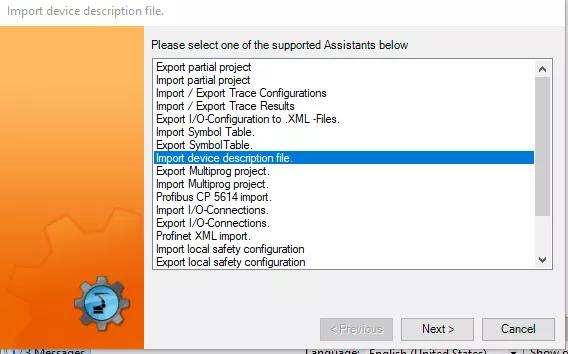
点击浏览,找到相关的 ESI 文件,导入后系统会自动更新设备目录。(必须将机器人项目关闭才能导入设备说明文件)

2. 组态配置
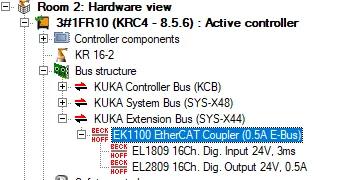
使用笔记本电脑将机器人项目上传至所使用的 WorkVisual 软件中,激活该项目,选择总线结构(Bus structure),点击鼠标右键,添加。


选择 KUKA Extension Bus,点击鼠标右键添加,将 EK1100 模块添加至 KEB 总线上。

选择 EK1100 模块,点击鼠标右键添加,将 EL1809 和 EL2809 添加到 EK1100 下方。

3. 地址映射(I/O Mapping)
以输入信号为例:点击 IO Mapping 标签 ,左边选择 KRC I/Os ,点击 Digital Inputs 右侧选择 Fieldbusses 标签,点击 EL1809 模块。

右边 Ctrl+A 全选,然后拖曳至左侧机器人起始输入端地址位,结果见下图。

输出的地址映射也是如此。
了解更多库卡机器人示教器,库卡机器人控制柜,请咨询:库卡机器人备件
